Como projetar juntas robóticas tão eficientes quanto nossos joelhos
Seja um robô humanoide, um veículo ou uma máquina industrial, você sempre vai precisar de juntas. E, se quer que esses equipamentos funcionem de maneira eficiente, gastando menos energia e exigindo menos manutenção, é bom investir em juntas eficientes.
E, como nossos joelhos, cotovelos e ombros parecem ser uma ótima fonte de inspiração, já que operam por décadas sem qualquer intervenção, Colter Decker e colegas da Universidade de Harvard decidiram começar por aí.
O grande problema é que cada máquina exige seu próprio tipo de junta, e a definição de como uma junta deve se mover geralmente exige softwares e algoritmos de controle customizados. Decker então desenvolveu uma estrutura matemática quer permite otimizar o projeto de articulações baseadas no “projeto” do joelho humano.
“Fizemos um bocado de cálculos para determinar se, com uma trajetória específica desejada para a articulação e uma determinada taxa de transmissão de força ao longo dessa trajetória, seria possível encontrar superfícies e polias que apresentassem essas propriedades,” detalhou Decker. “Então, podemos aplicar esse processo de design para otimizar as articulações para tarefas como andar, pular ou agarrar.”
Tecnicamente conhecidos como articulações de contato rolante, mecanismos eficientes desse tipo prometem viabilizar a construção de garras robóticas melhores, dispositivos de assistência motora personalizados para humanos e robôs que se movem com a mesma graciosidade que os animais.
De modo mais geral, enquanto as juntas de contato rolante tradicionais são construídas a partir de superfícies circulares, o novo método matemático permite formas não circulares e irregulares que seguem trajetórias incomuns. “Agora que podemos projetar as juntas, podemos começar a aplicá-las a [inúmeros] cenários diferentes,” concluiu Decker.

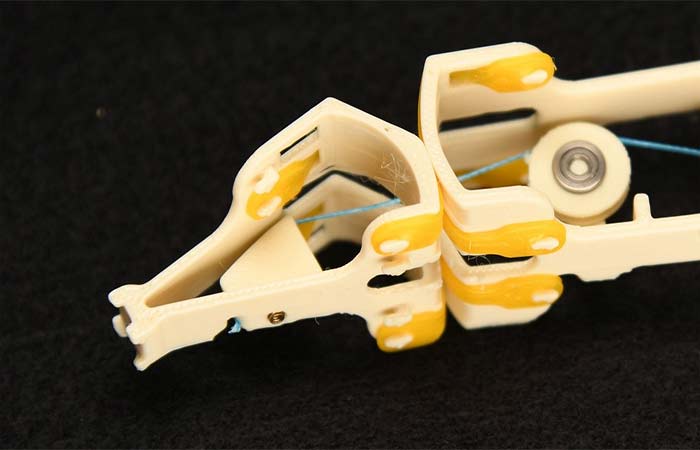
[Imagem: Wood Lab/Harvard/SEAS]
Juntas de contato rolante
Tudo começou com a ideia de projetar juntas para uma garra robótica flexível que deveria envolver os objetos delicadamente, mas também que fosse capaz de aplicar forças intensas.
A busca por maneiras de combinar ligações rígidas com juntas macias e flexíveis – muito semelhantes aos ossos e à cartilagem da mão humana – levou a equipe até as juntas de contato rolante, que são pares de superfícies curvas que rolam umas contra as outras e são mantidas unidas por conectores flexíveis.
Embora rolamentos e cruzetas sejam as opções mais comuns para juntas de robôs, as juntas de contato rolante oferecem vantagens exclusivas, como flexibilidade, baixo atrito e alta resistência ao desgaste, o que as torna opções favoráveis em aplicações específicas.
Para demonstrar a eficiência do seu método de projeto, a equipe desenvolveu uma junta semelhante a um joelho que reduz o desalinhamento em 99% em comparação com mecanismos padrão, e uma garra robótica capaz de suportar três vezes o peso de uma garra projetada convencionalmente.
Joelhos e exoesqueletos
Esta é uma ótima notícia para a construção de dispositivos de assistência motora, como os exoesqueletos. Nos suportes ao movimento dos joelhos, por exemplo, hoje são usados rolamentos simples colocados perto do joelho, mas isso pode causar desalinhamentos que são muito dolorosos, já que um joelho real é muito mais versátil do que um simples rolamento. O novo projeto abre o caminho para joelheiras ativas, exoesqueletos ou próteses articulares que poderão ser adaptados aos movimentos articulares específicos de cada indivíduo.
Já o protótipo de garra robótica teve suas juntas otimizadas para que os dedos aplicassem força máxima dependendo do tamanho do objeto. A garra foi capaz de segurar mais de três vezes o peso de uma versão construída com juntas circulares e polias padrão, para a mesma entrada do atuador.
Artigo: Noncircular rolling contact joints enable programmed behavior in robotic linkages
Autores: Colter J. Decker, Tony G. Chen, Michelle C. Yuen, Robert J. Wood
Revista: Proceedings of the National Academy of Sciences
Vol.: 123 (6) e2521406123
DOI: 10.1073/pnas.2521406123